Zirkuitu elektrikoa probatzen 1
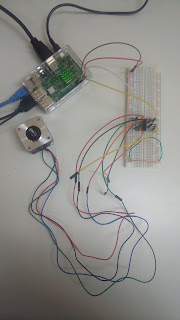
Behin konektatuata, kontruratu gara H zubia kontrolatzeko eredu honetan bakarrik 4 pin ateratzen direla (+ 5V-ko irteera bat eta GND bat). Baina guk 3 motor ditugunez, 6 pin beharko genituzke , hau da, beste H zubi bat beharko dugu, edo 3 eta horrela encoderetarako beste pin batzuk libre izango genituzke, baina azkenengo hau ez dago guztiz argi. Bestalde elikatze iturri egokia oraindik ez daukagunez ezin izan dugu motorrra frogatu, beraz hurrengo astean elikatze iturria lortuko dugu bai edo bai.